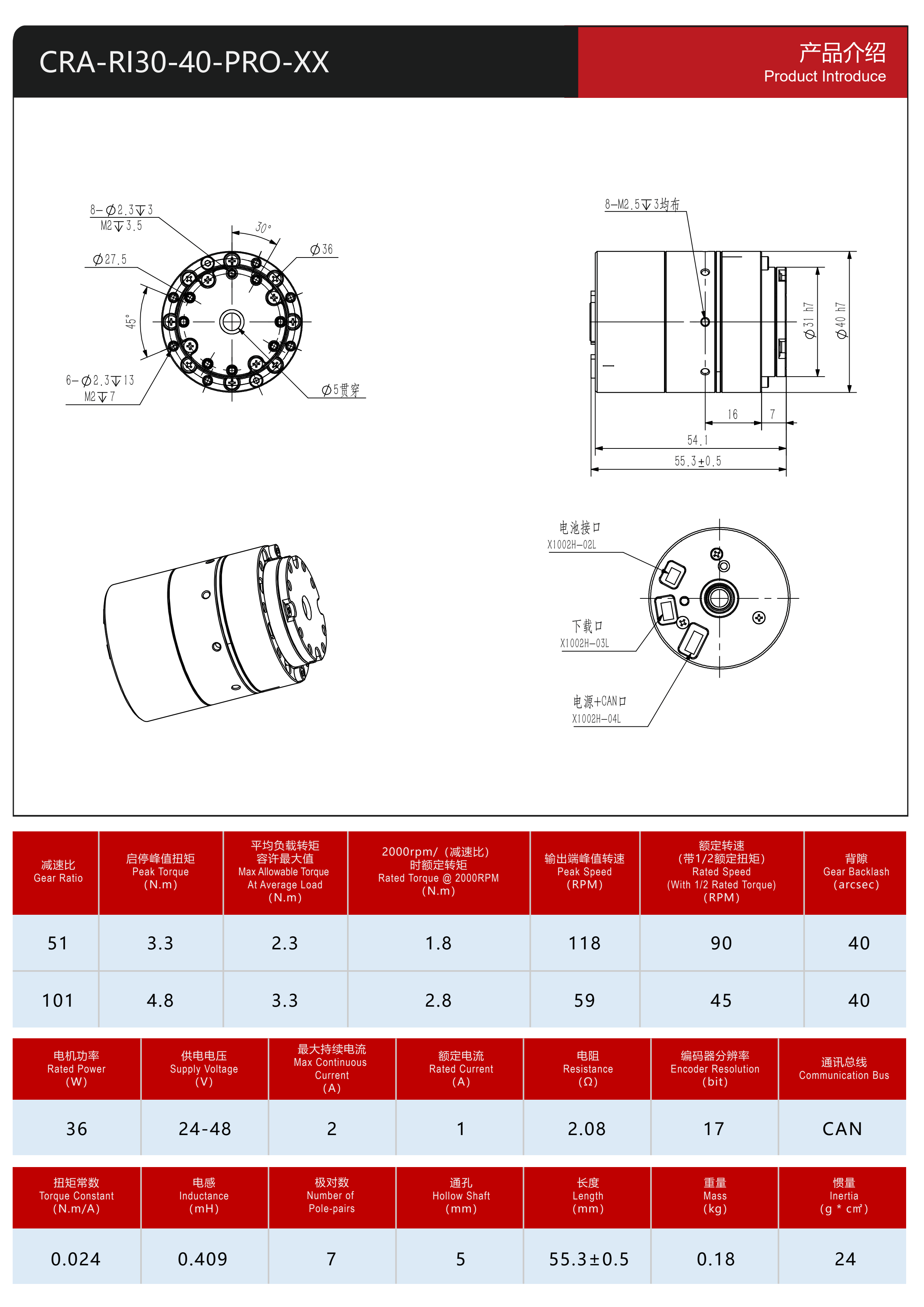
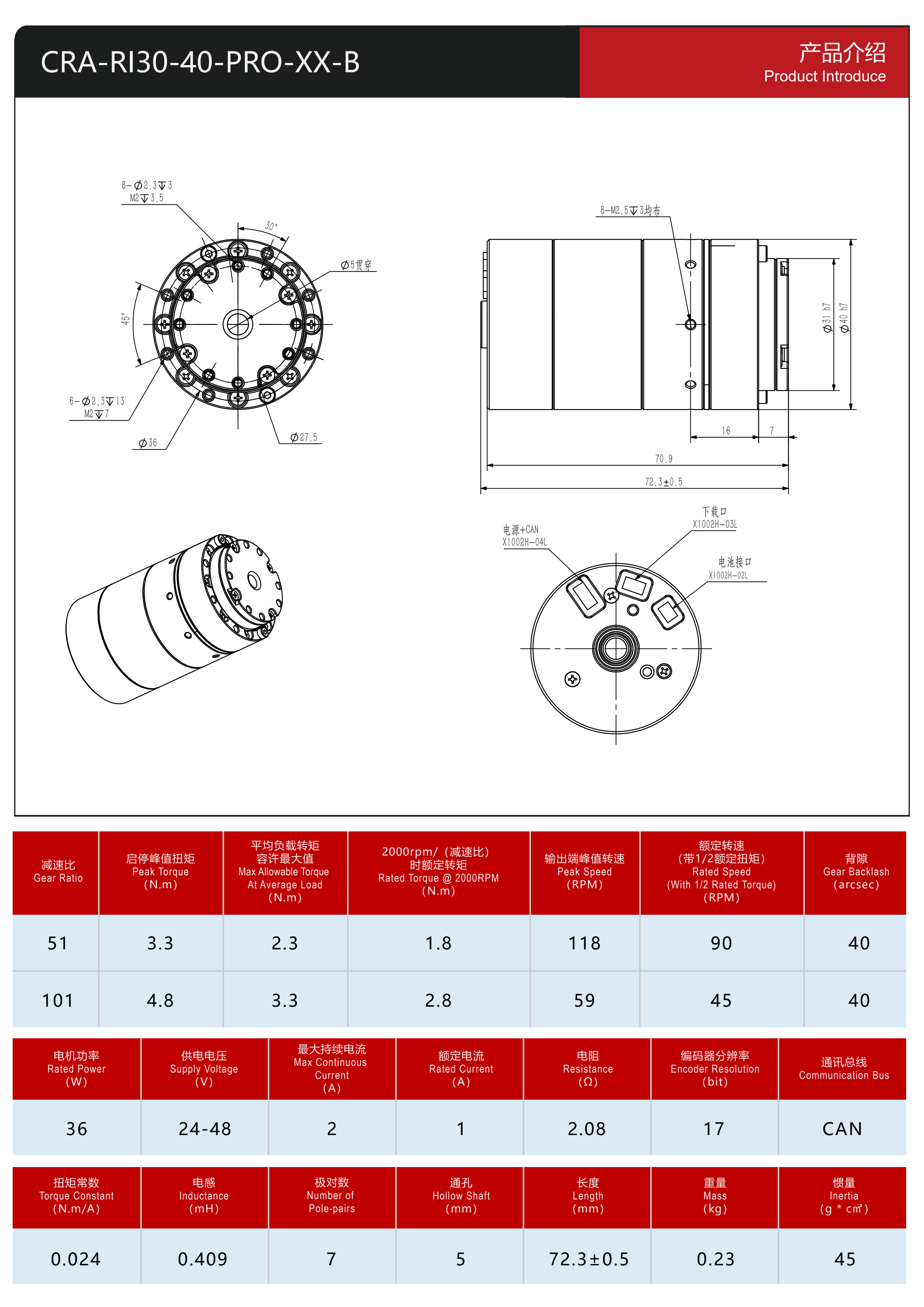
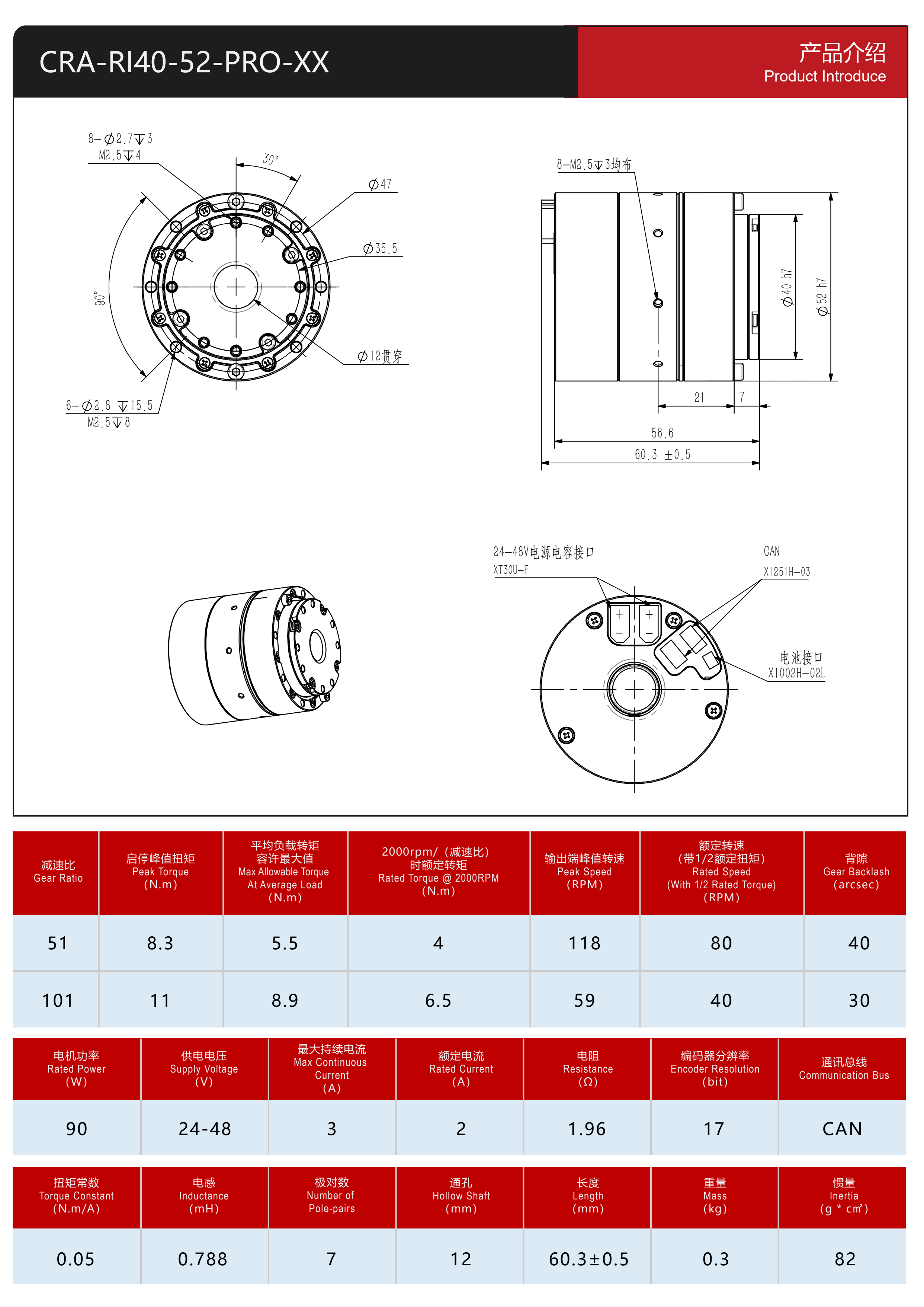
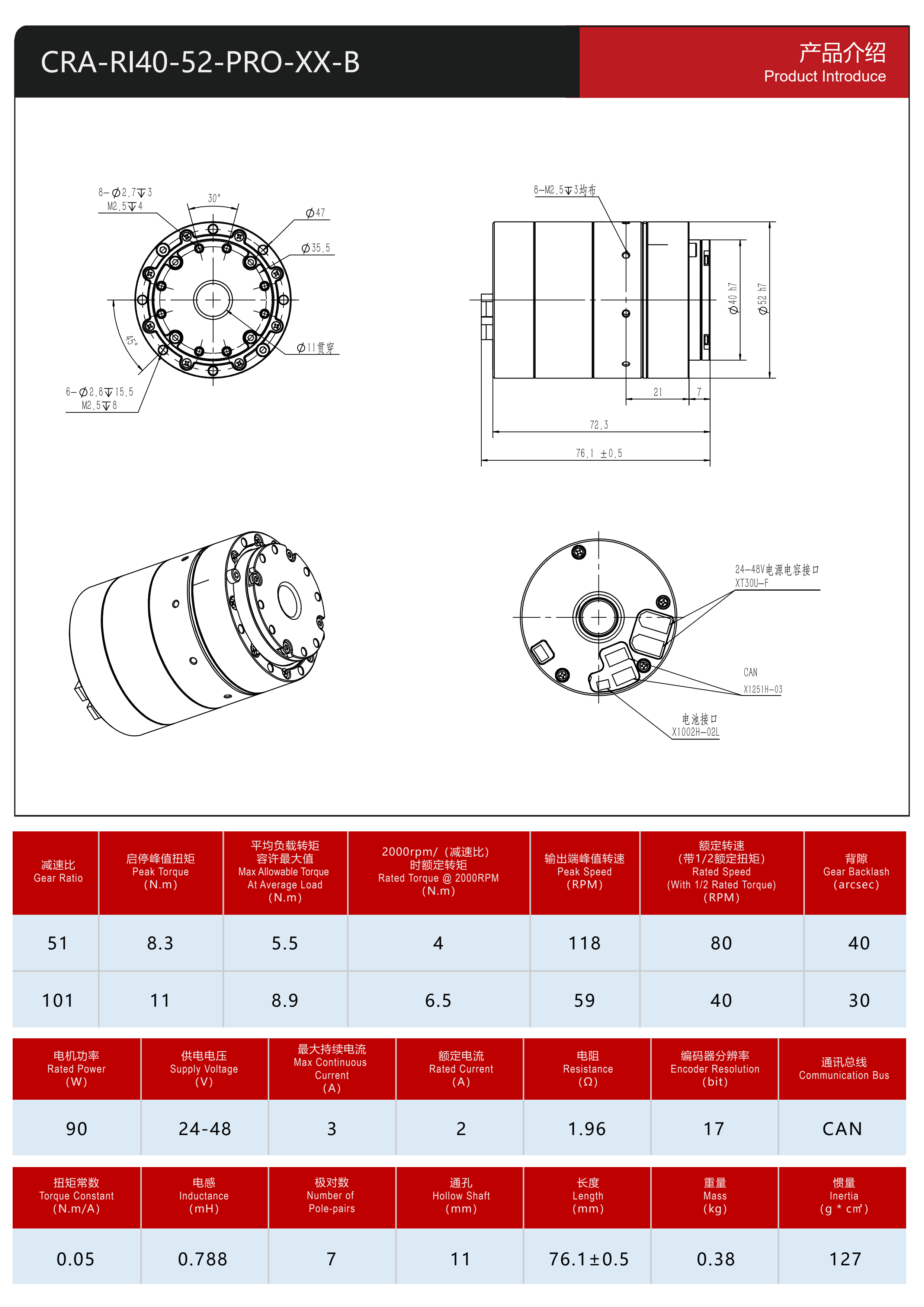
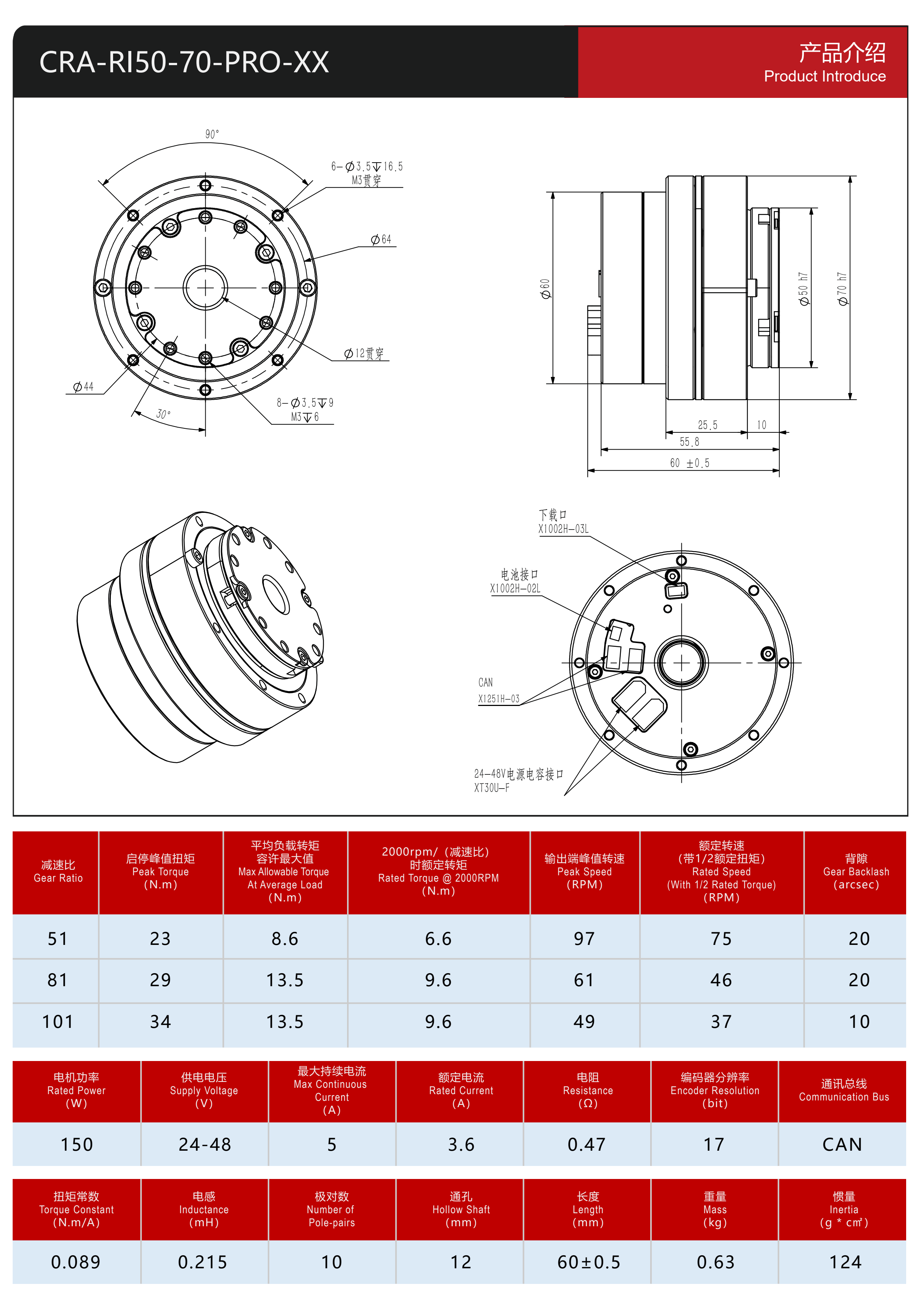
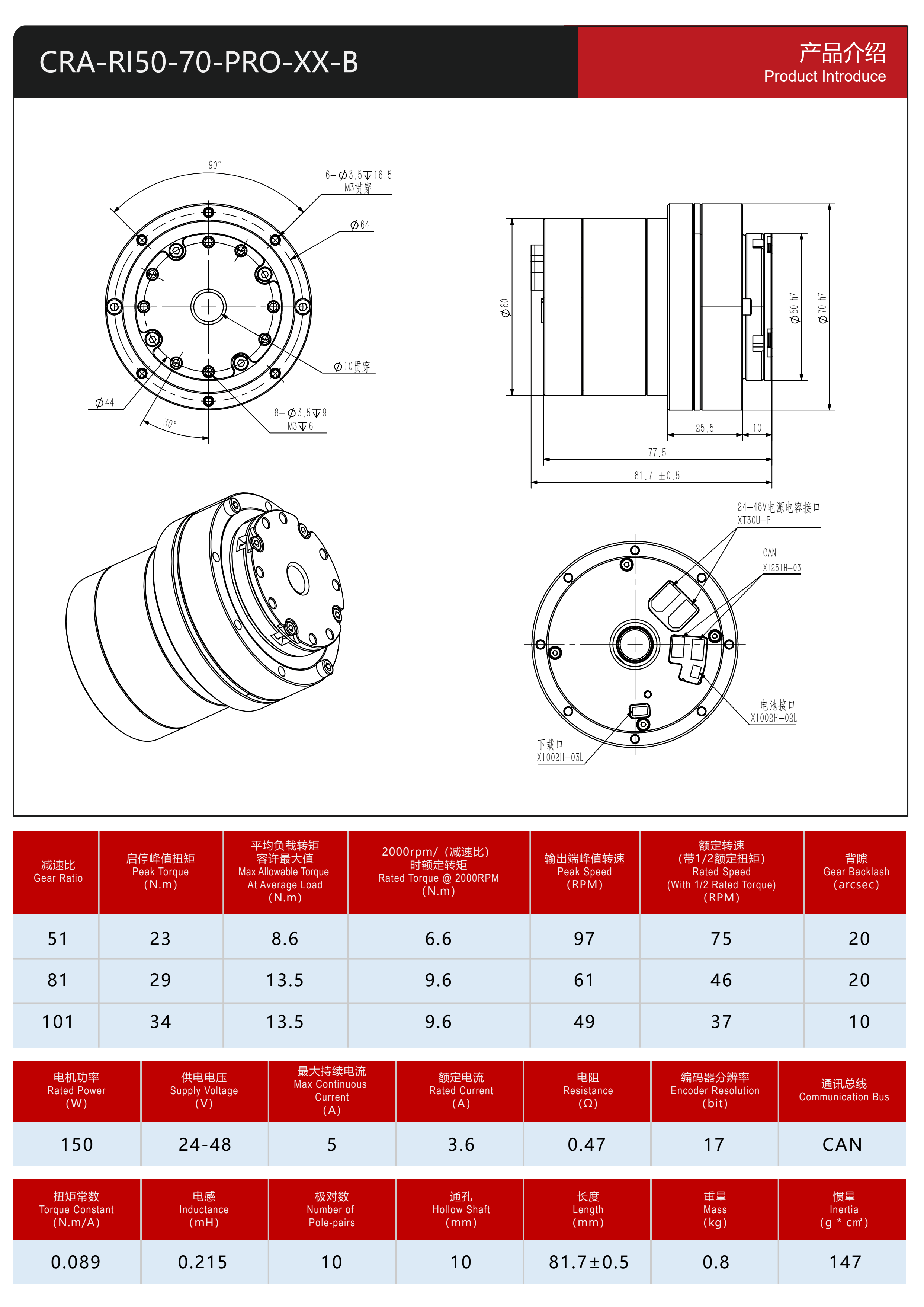
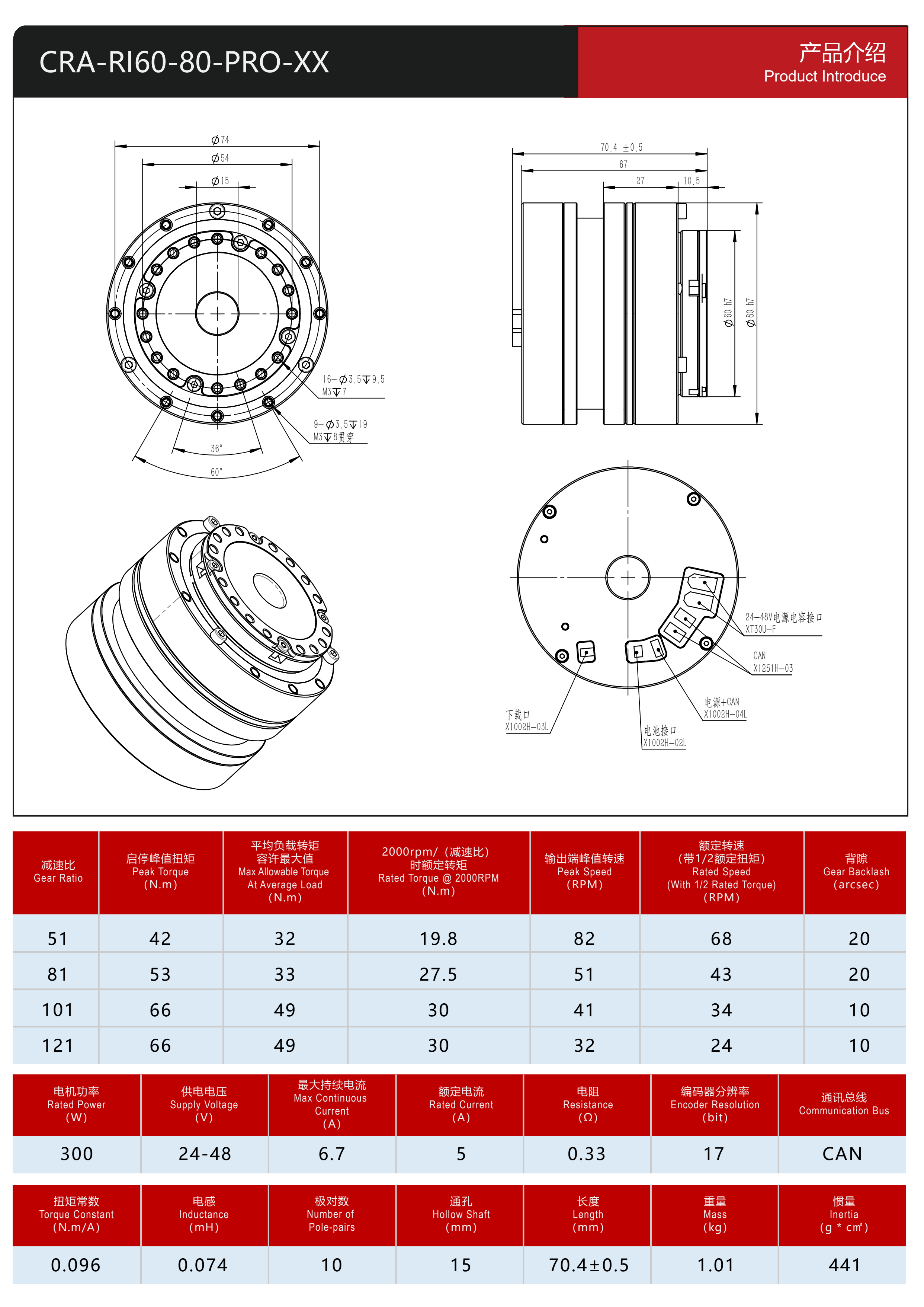
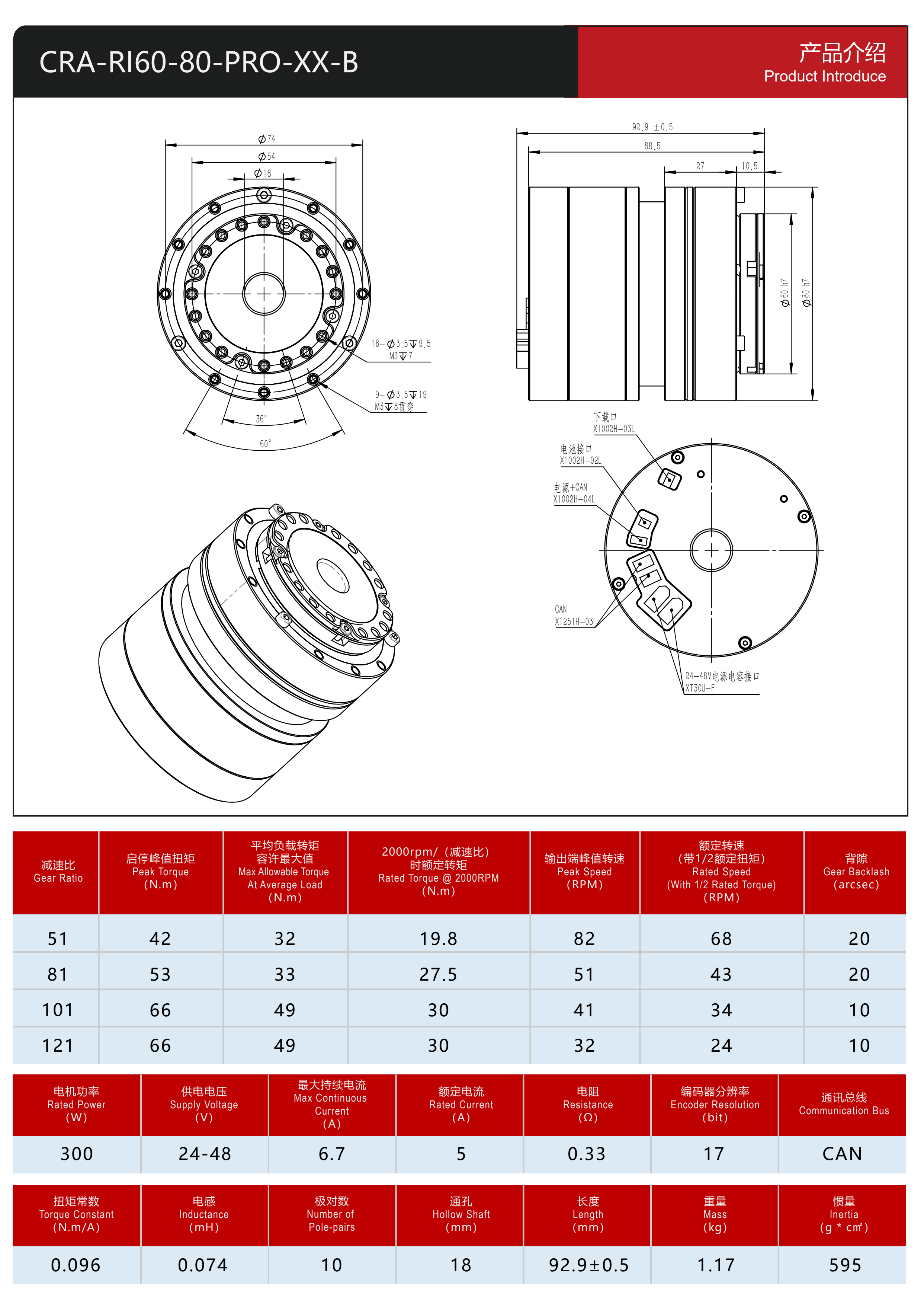
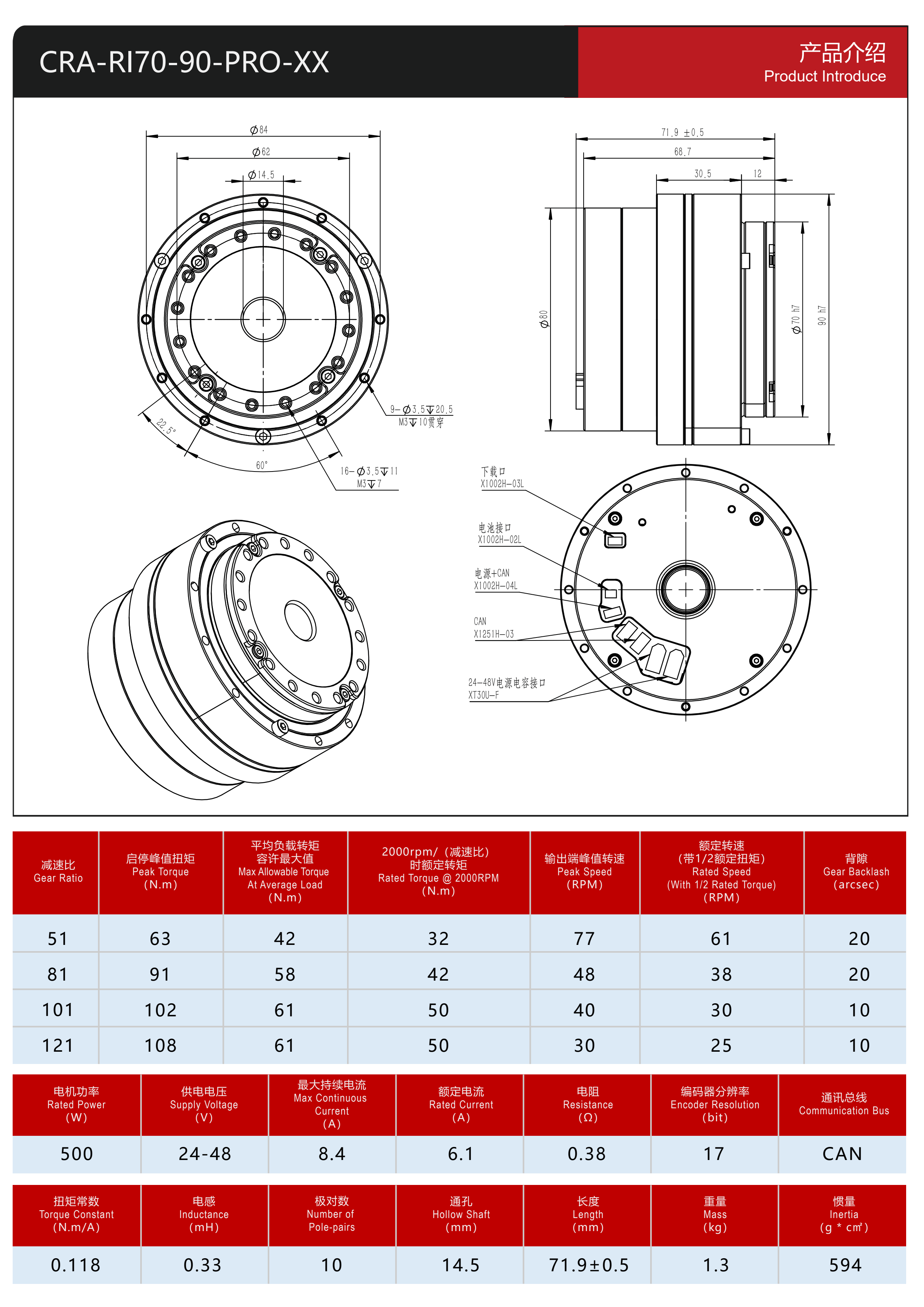
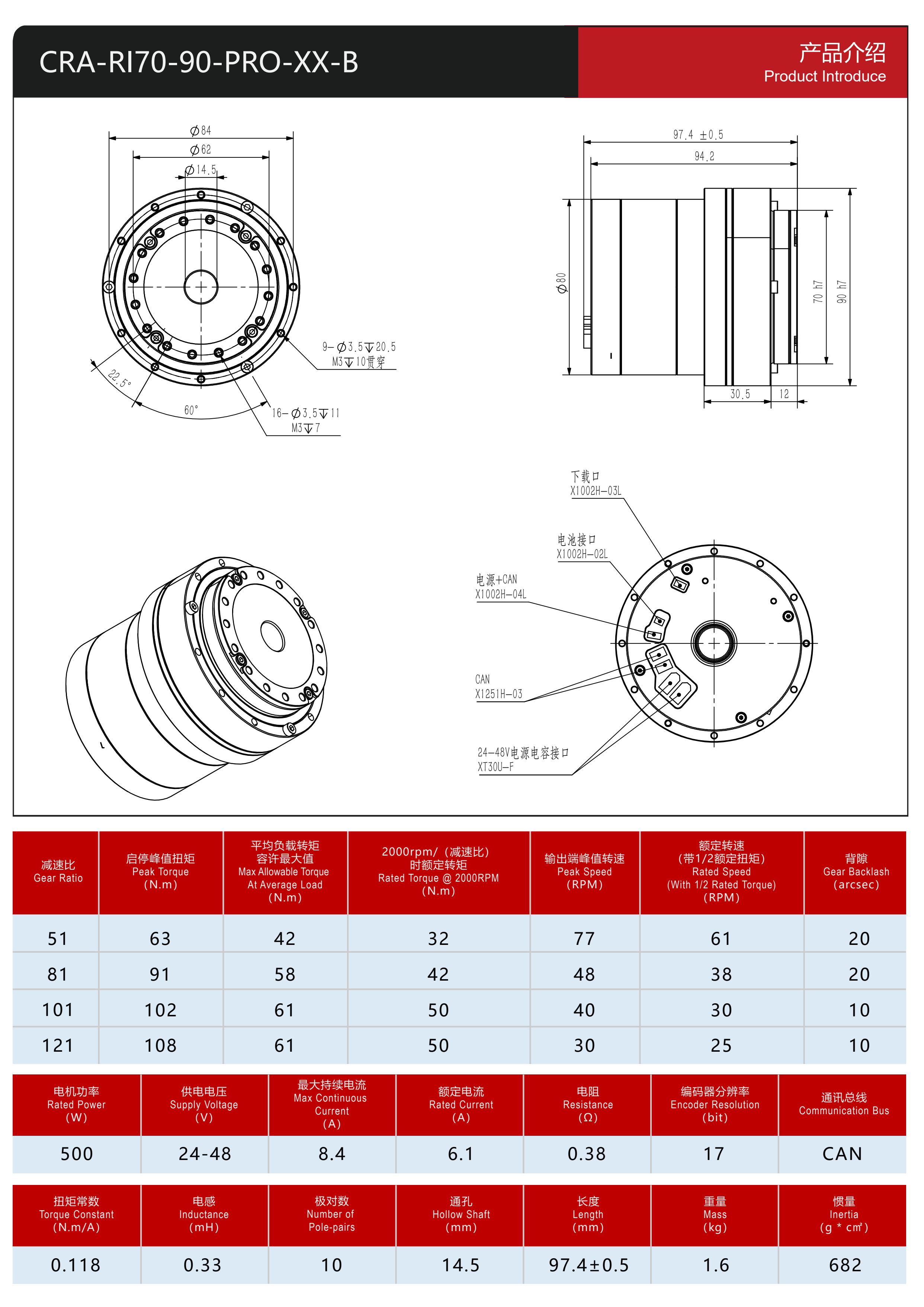
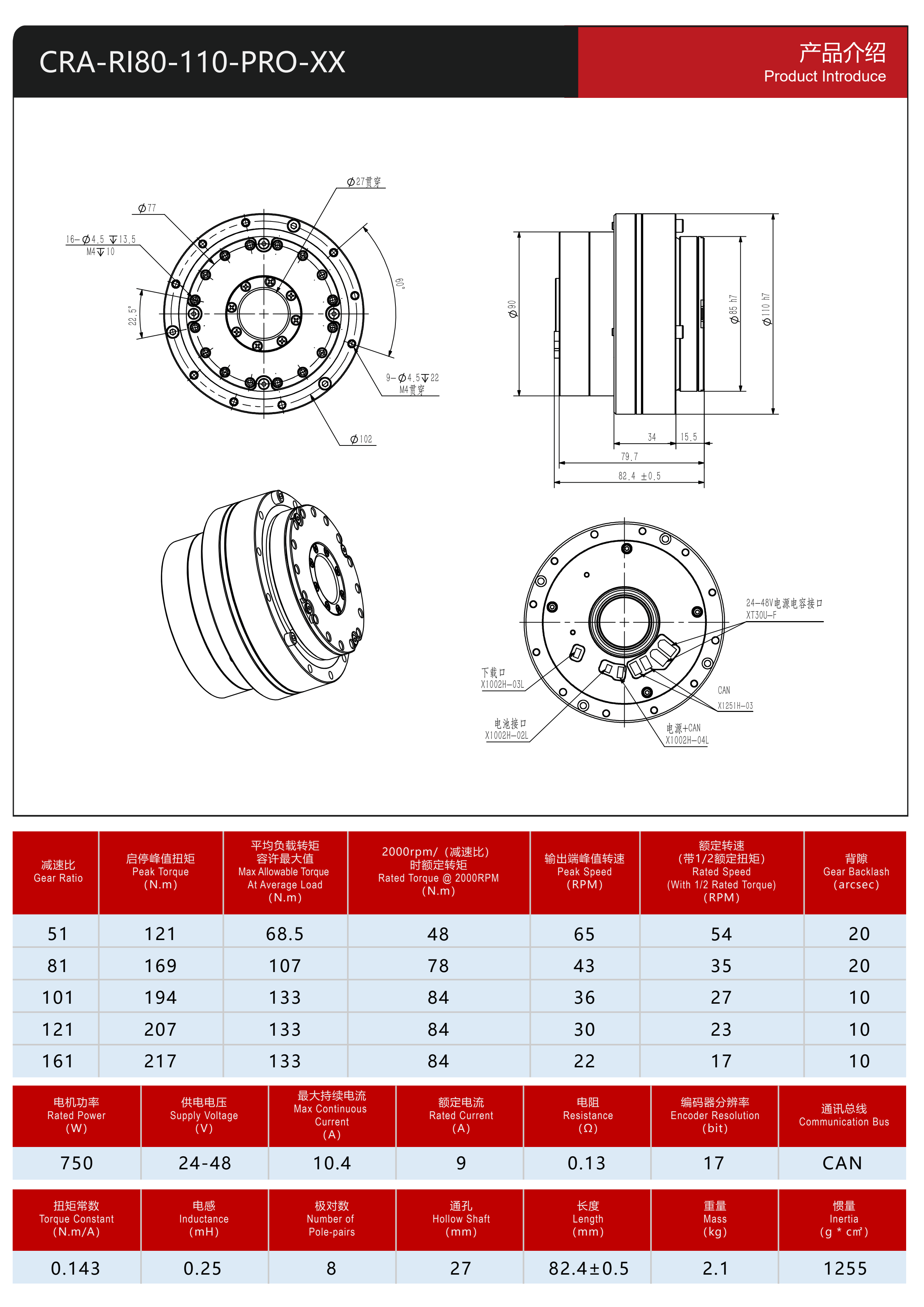
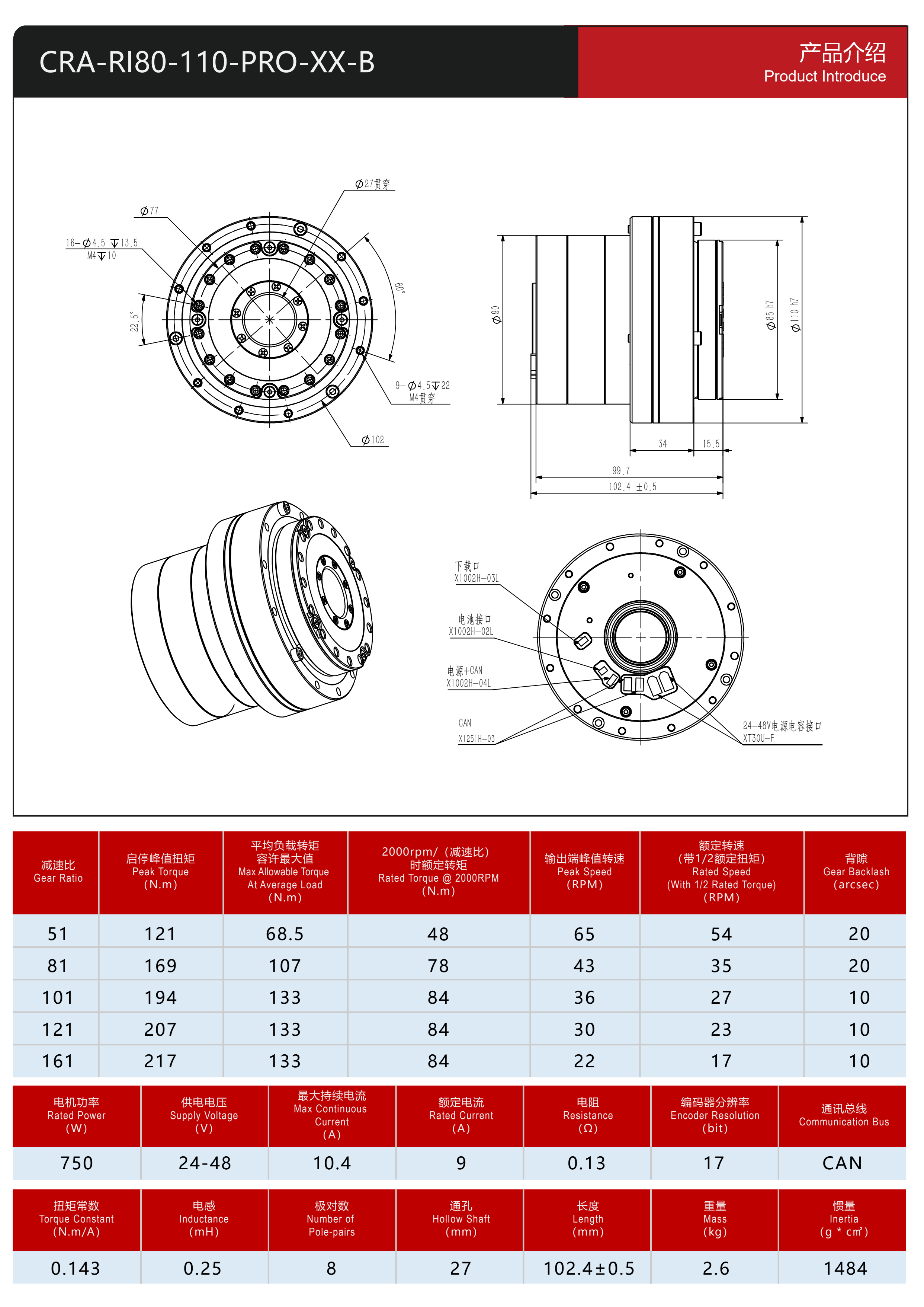
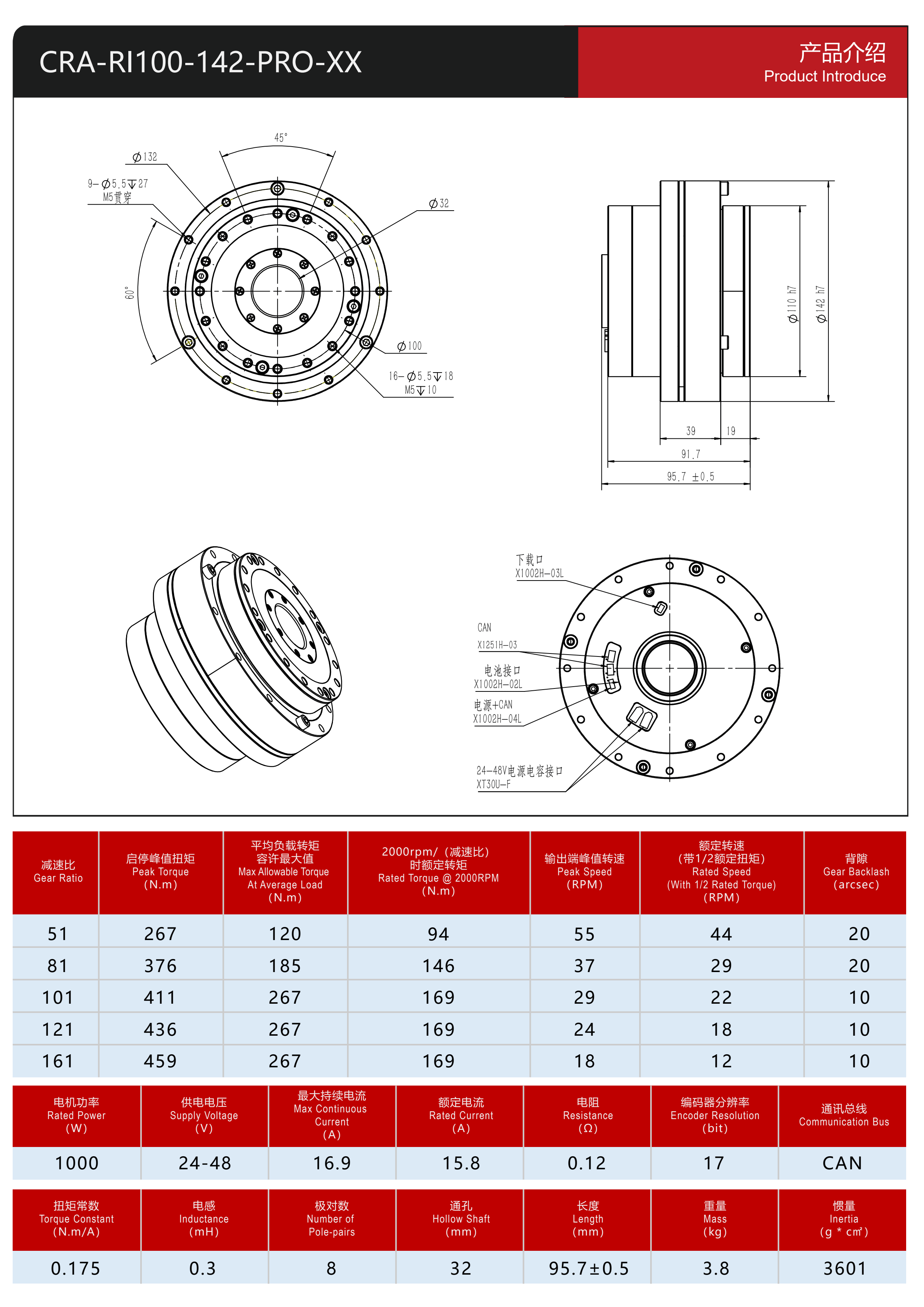
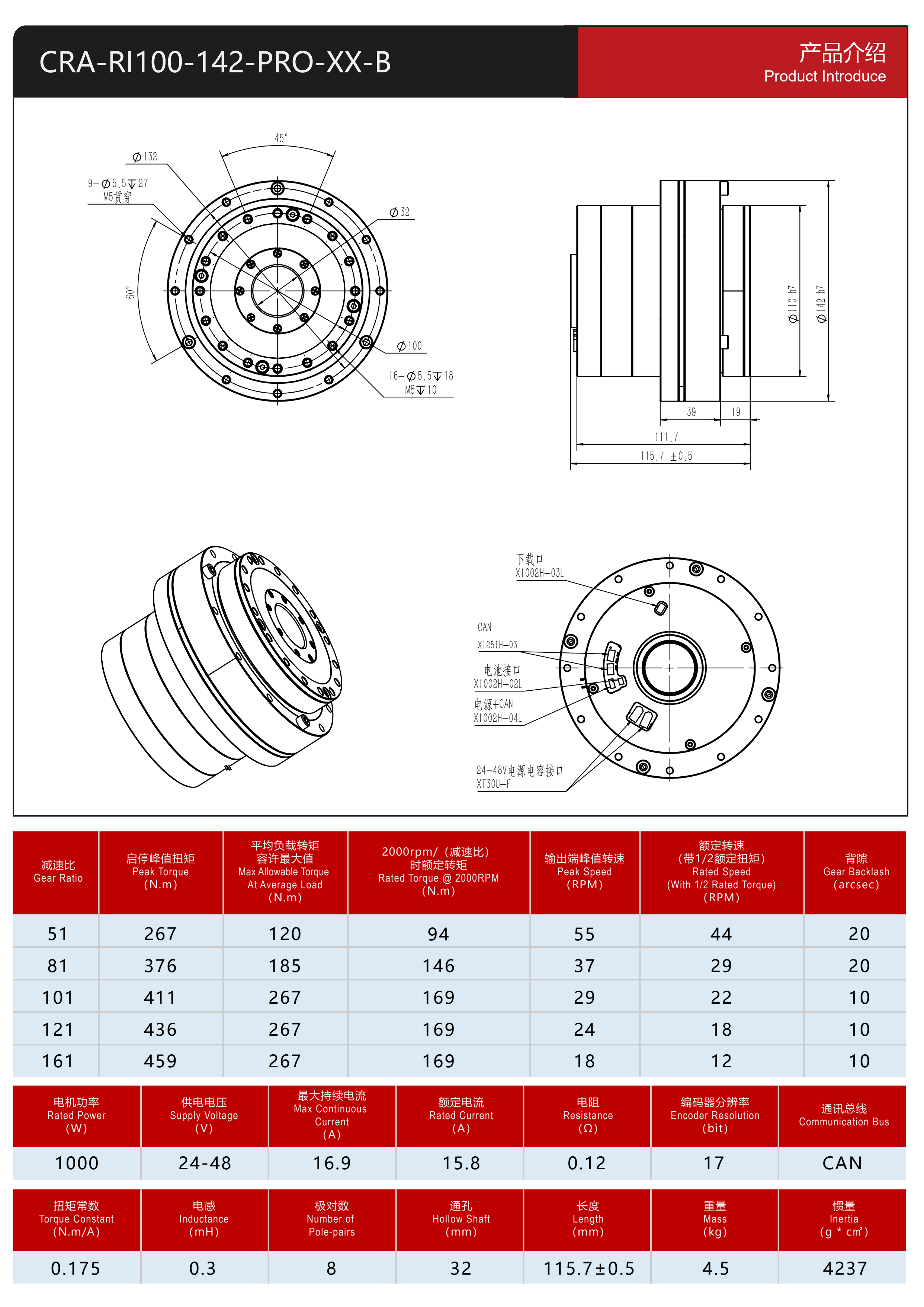
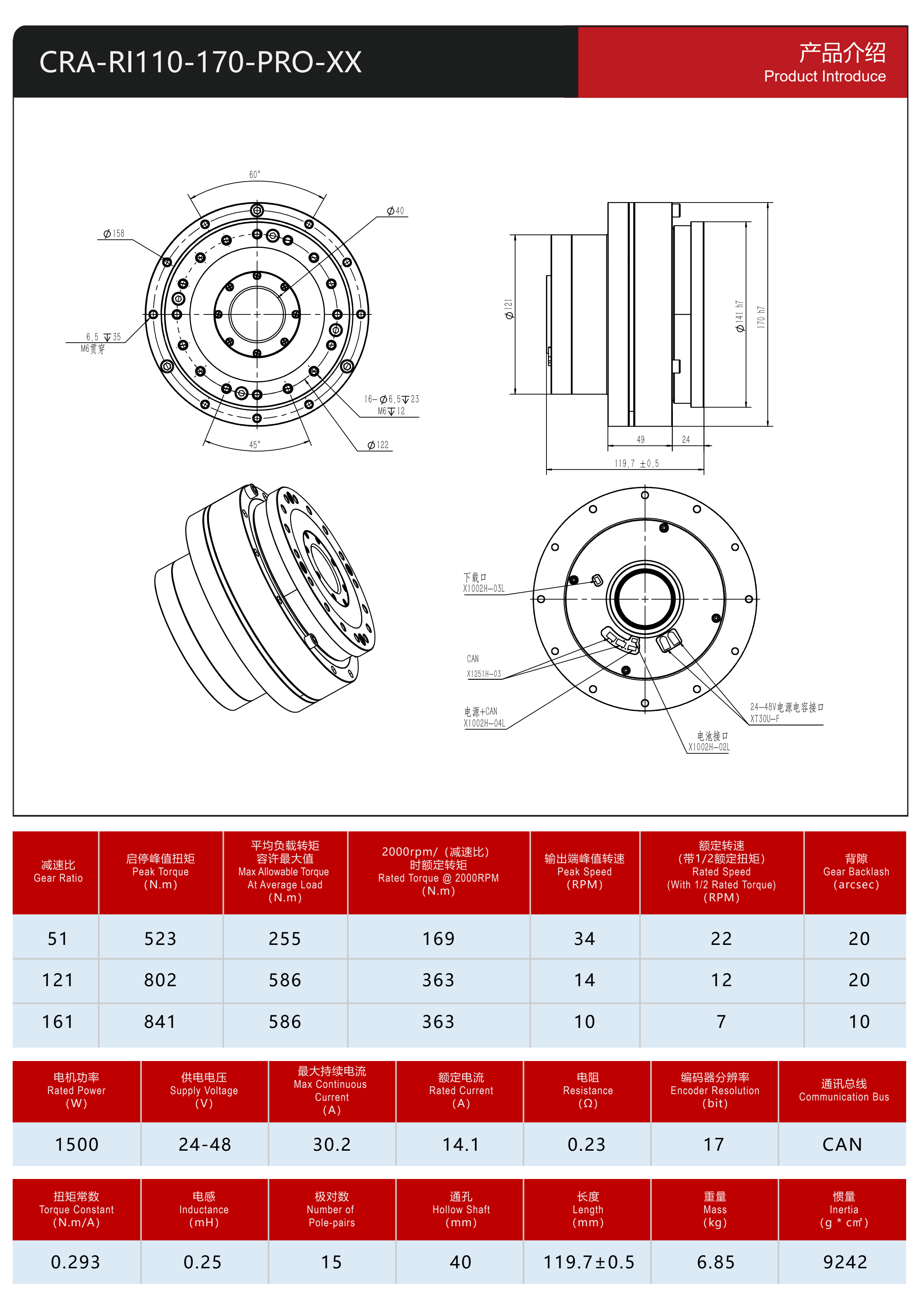
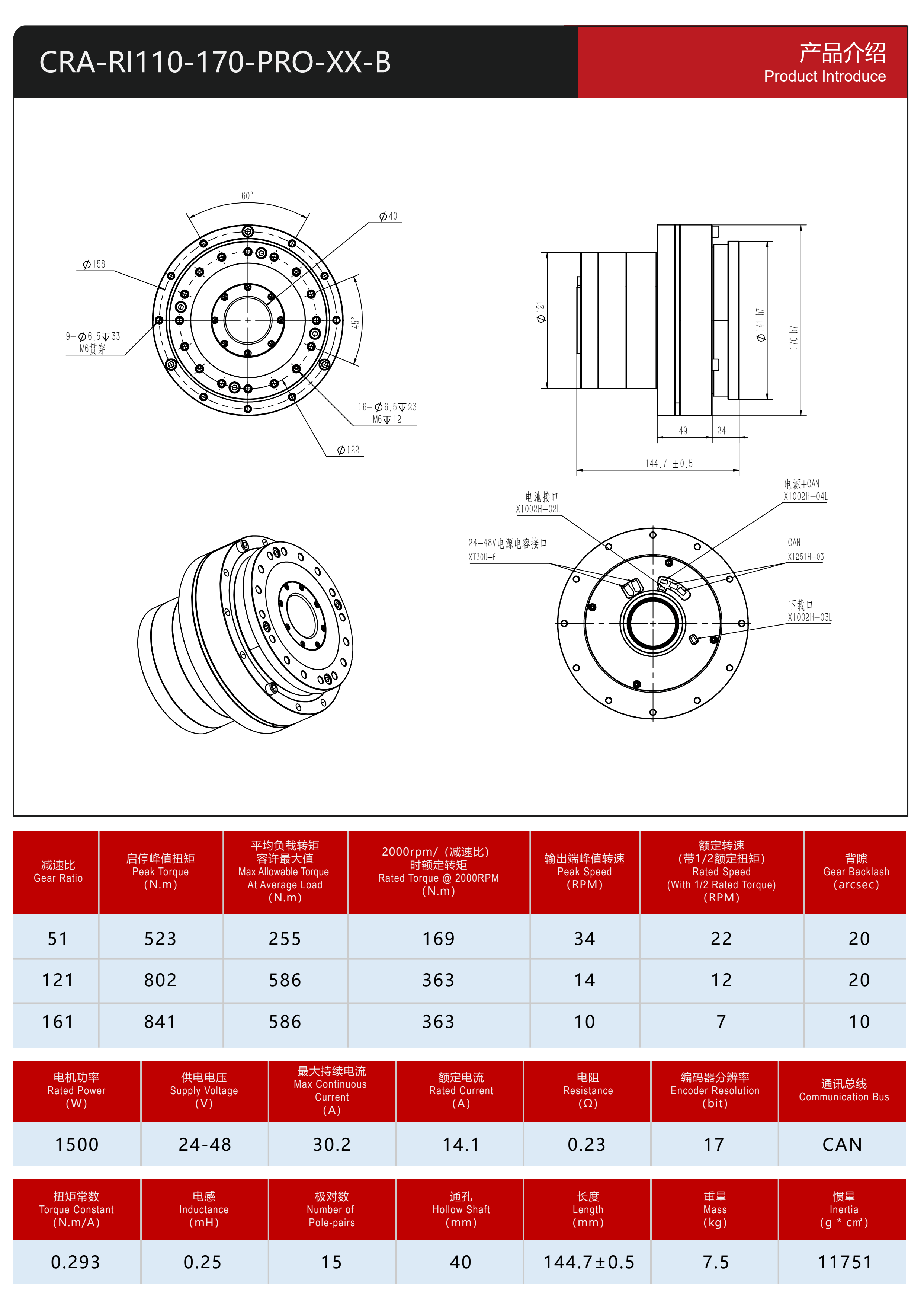
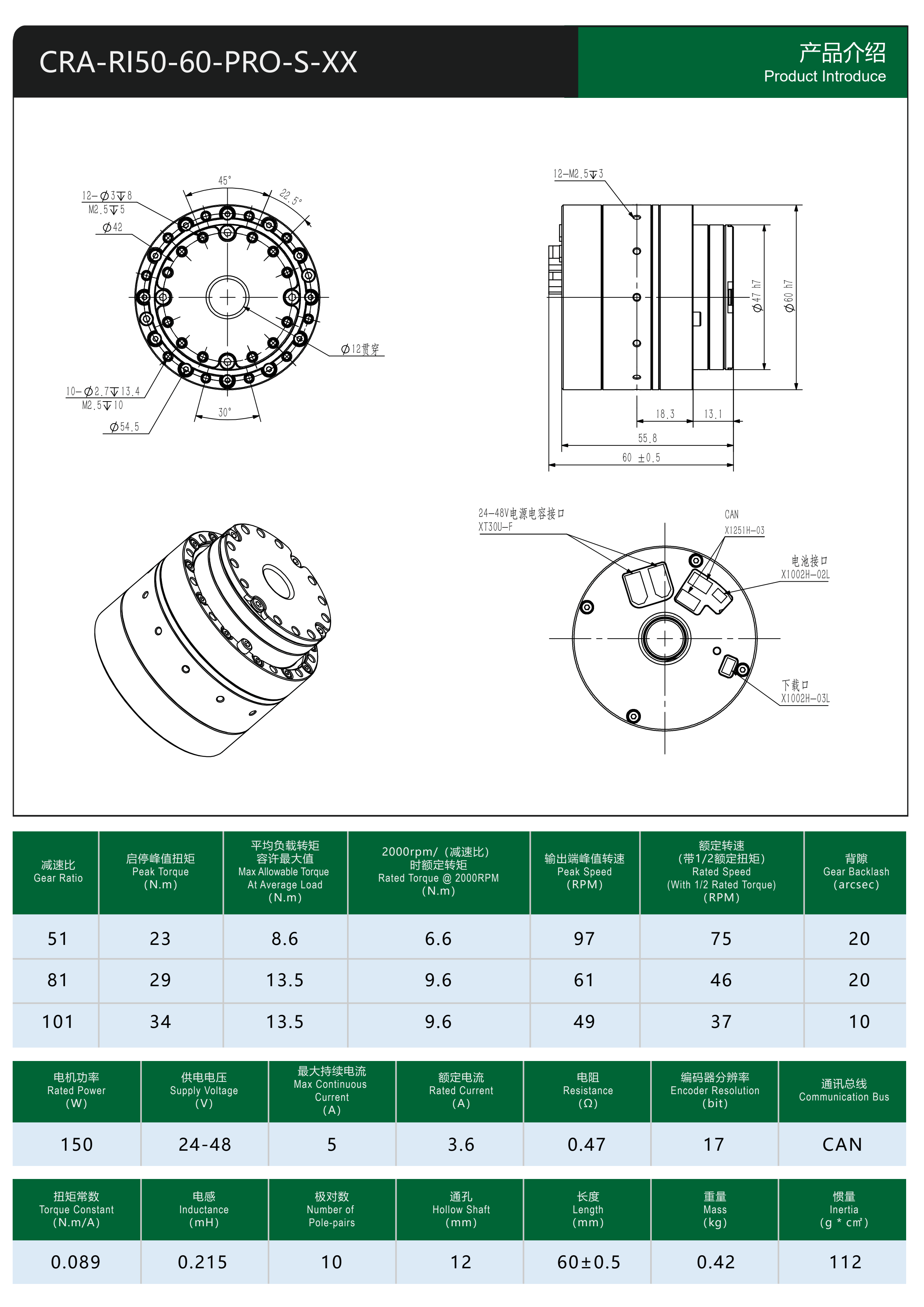
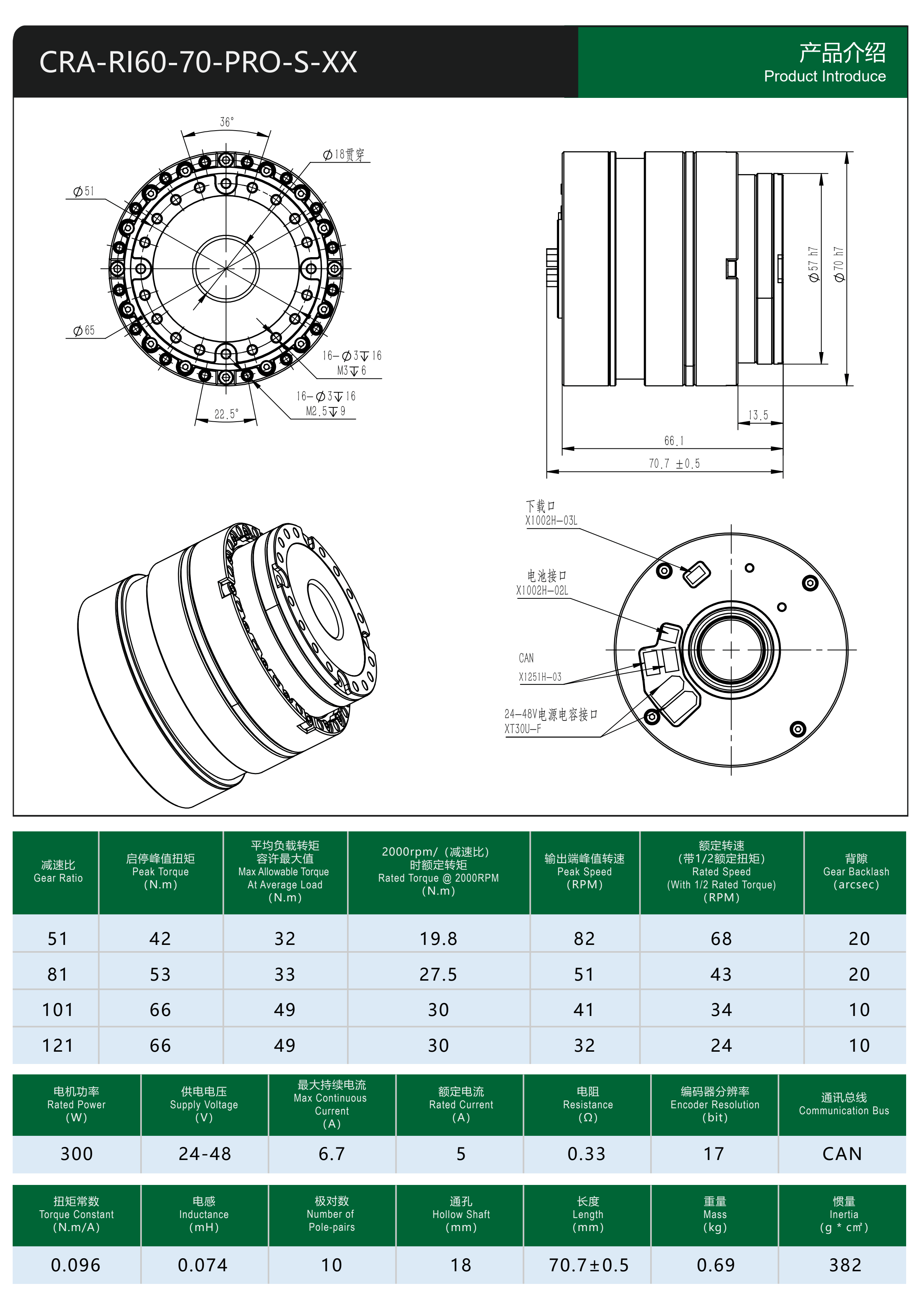
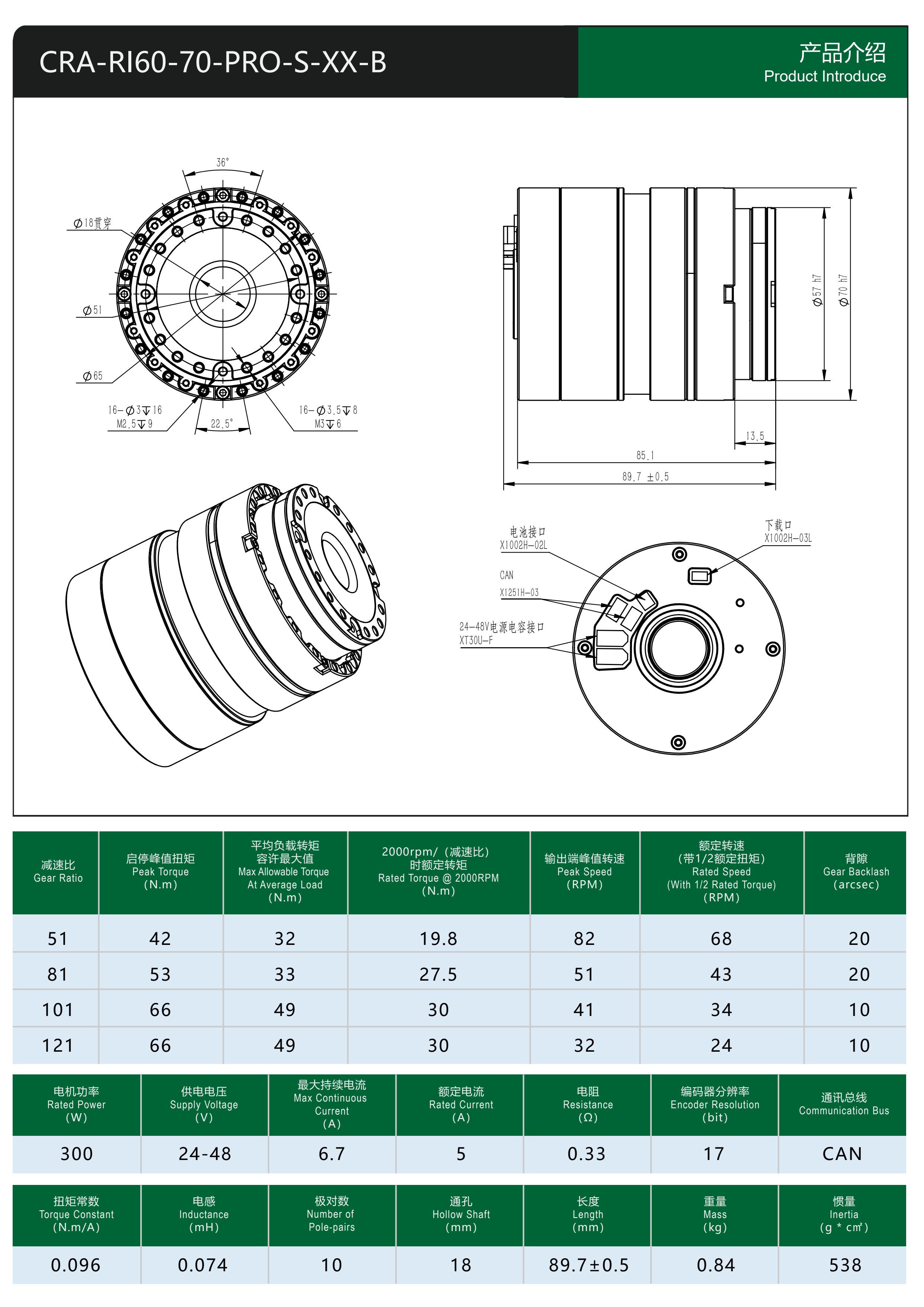
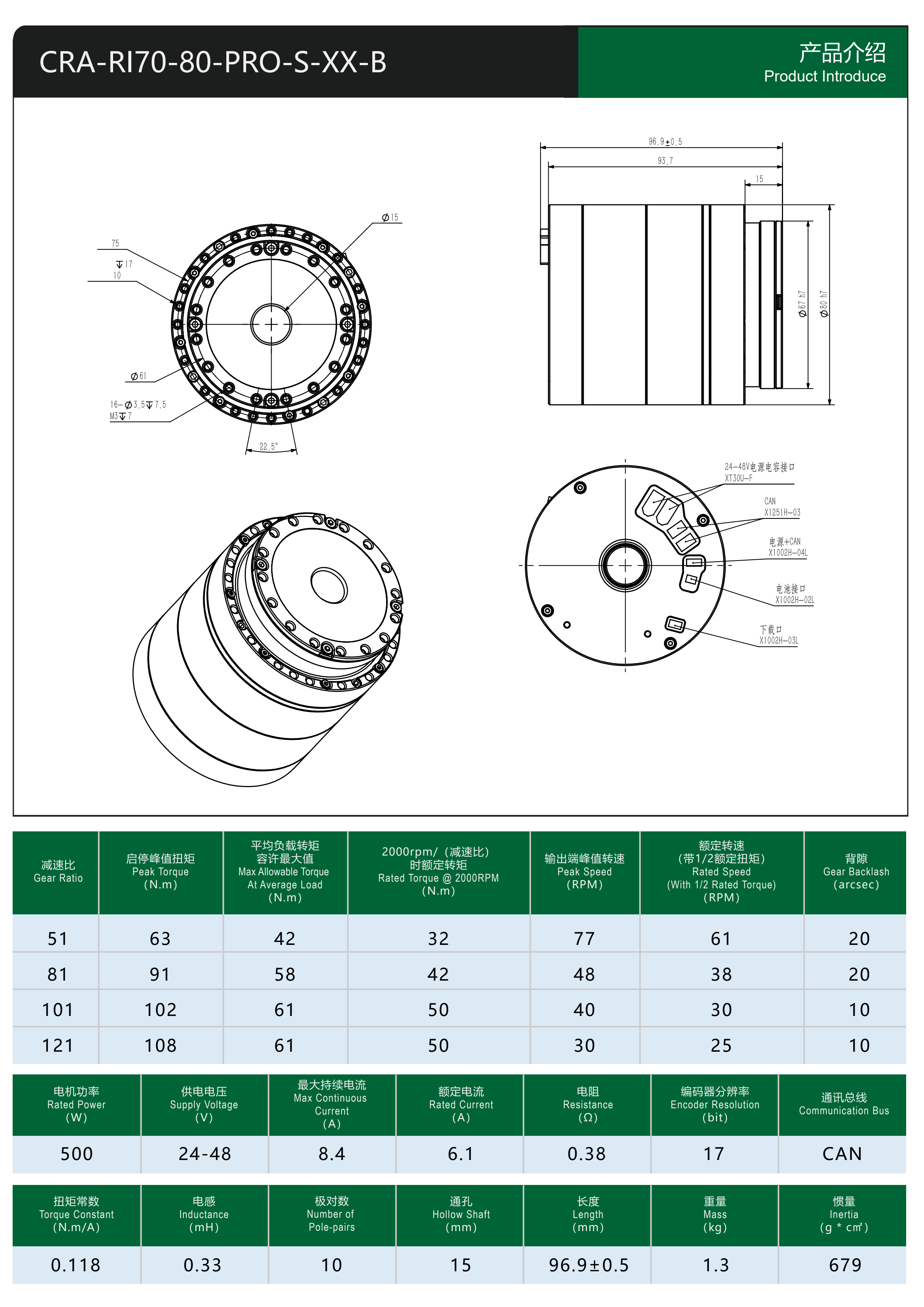
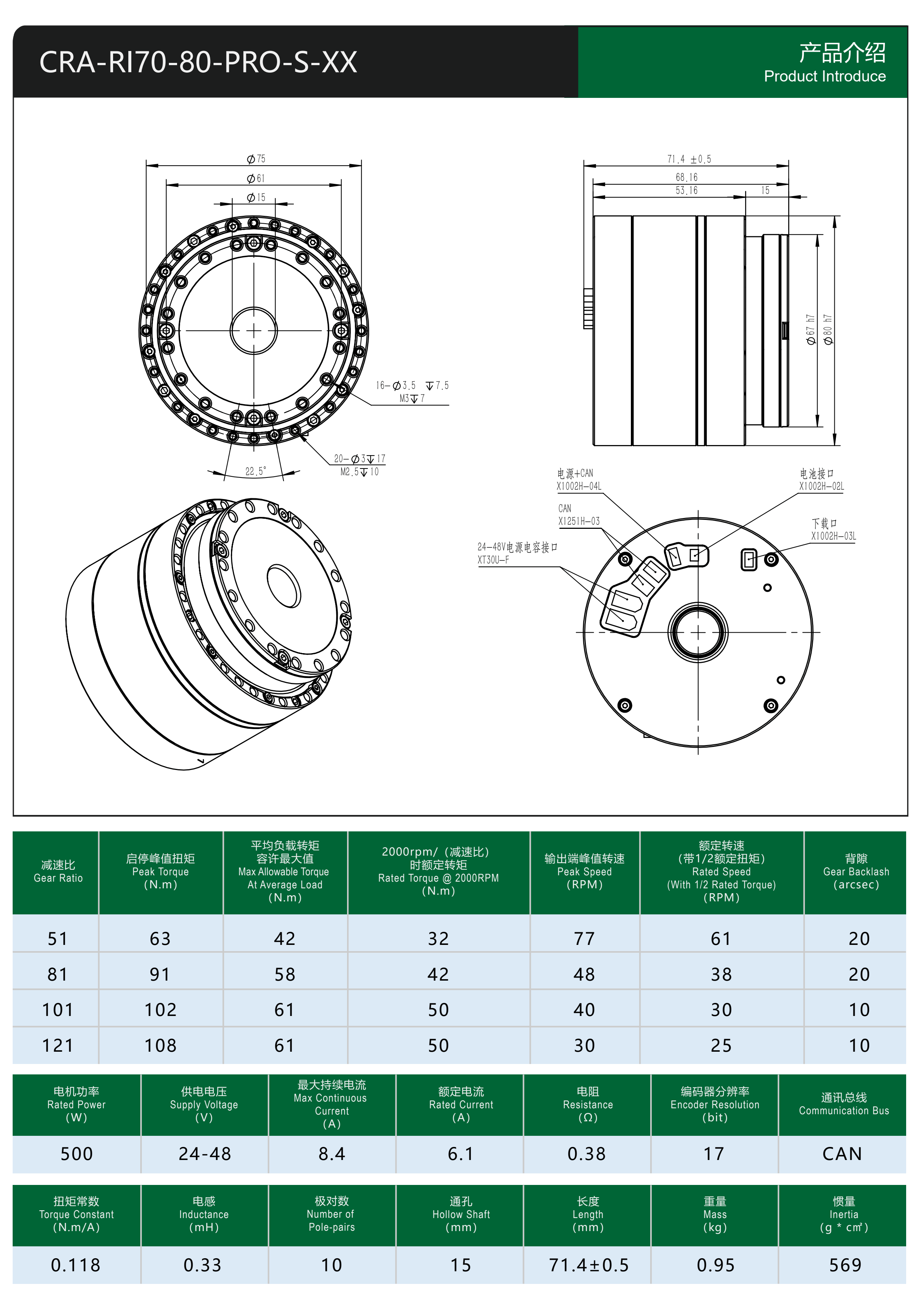
Hollow Shaft Rotary Actuator
Robot integrated hollow actuator, integrated brake, dual encoding, harmonic reducer and drive,
| Applications: | Humanoid robot, Quadruped robot, Exoskeleton robot, Rehabilitation robot, Wheeled robot, bipedal Robot, Robotic arm, others |
| Reducer ratio: | 51 | 81 | 101 | 121 | 161 |
| Nominal Voltage (V): | 24~48 |
| Nominal Current (A): | 1 | 2 | 3.6 | 5 | 6.1 | 9 | 14.1 | 15.8 |
| Nominal Power (W): | 36 | 90 | 150 | 300 | 500 | 750 | 1000 | 1500 |
| Nominal Speed (Rpm): | 7 | 12 | 17 | 18 | 22 | 23 | 24 | 25 | 27 | 29 | 30 | 34 | 35 | 37 | 38 | 40 | 43 | 44 | 45 | 46 | 54 | 61 | 68 | 75 | 80 | 90 |
| Nominal Torque (Nm): | 2.3 | 3.3 | 5.5 | 8.9 | 8.6 | 13.5 | 32 | 33 | 49 | 42 | 58 | 61 | 68.5 | 107 | 120 | 185 | 267 | 255 | 586 |
| Peak Current (A): | 2 | 3 | 5 | 6.7 | 8.4 | 10.4 | 16.9 | 30.2 |
| Peak Torque (Nm): | 3.3 | 4.8 | 8.3 | 11 | 23 | 29 | 34 | 42 | 53 | 66 | 63 | 91 | 102 | 108 | 121 | 169 | 194 | 207 | 217 | 267 | 376 | 411 | 436 | 459 | 503 | 802 | 841 |
| Backlash (arcsec): | 40 | 30 | 20 | 10 |
| Communication protocol: | CAN |
| Double Encoder: | Yes |
These products could also be interesting for you
Hollow Shaft Rotary Actuator
-
Rated Voltage:
-
24~48 V
-
Peak Torque:
-
3.3~841
Nm
-
Motor Size:
-
55x40~145x170
mm
Solid Shaft Rotary Actuator

-
Rated Voltage:
-
24-48 V
-
Peak Torque:
-
6~171
Nm
-
Motor Size:
-
76.1x52~102.4x110
mm
Harmonic Drive Actuator series

-
Rated Voltage:
-
24~36 V
-
Peak Torque:
-
2.2~220
Nm
-
Motor Size:
-
47.8x40~98.5x90
mm

