Unitree G1-D
Unitree G1-D / End-to-End Platform for Humanoid Robot
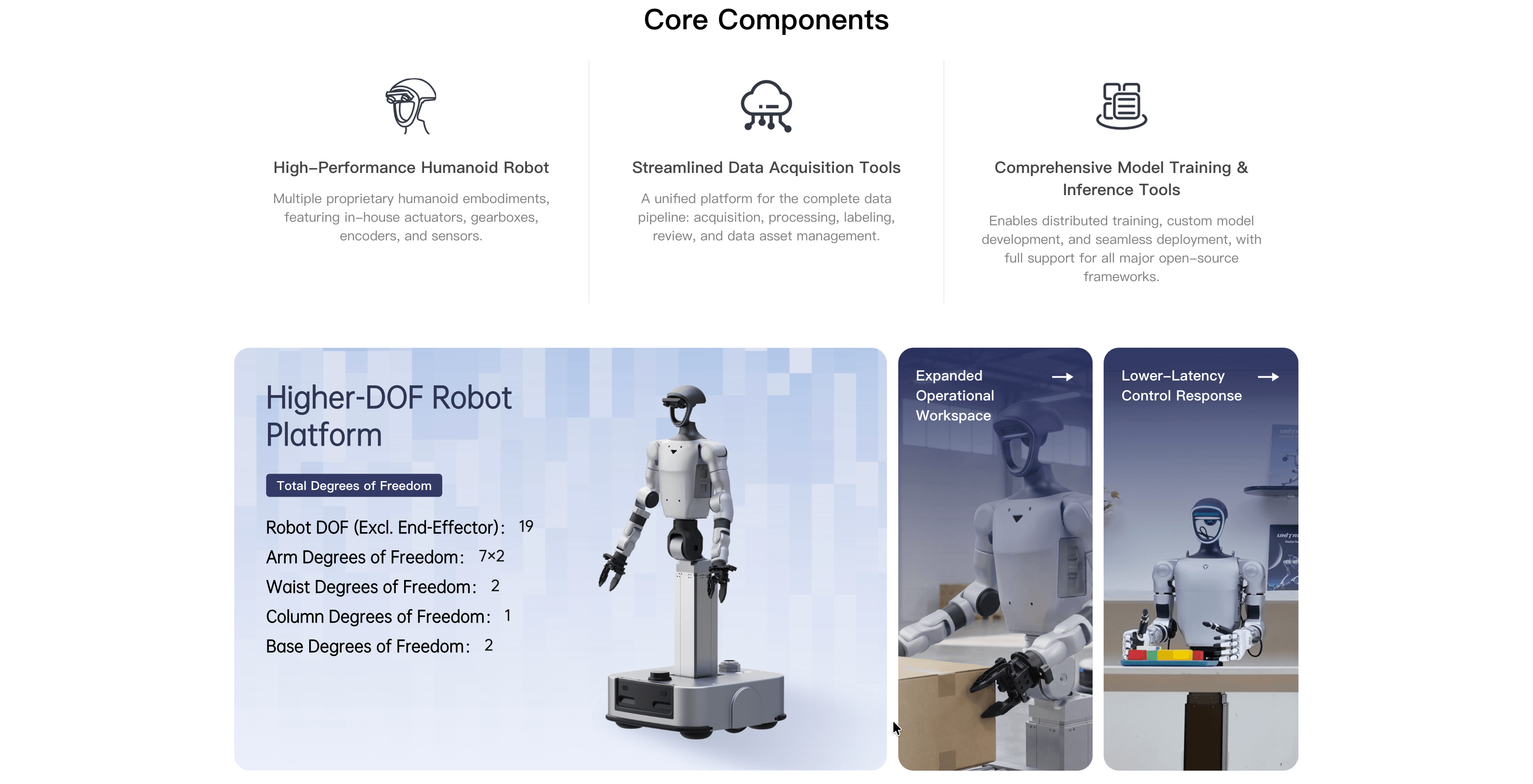
Higher-DOF Robot Platform
Expanded Operational Workspace
Lower-Latency Control Response
Contact Sales: [email protected]
Decision-Making Mode:Action Generation Powered by Precise Prediction
By analyzing the current environmental state and task objectives, the system accurately predicts future physical interactions between the robot and its surroundings. These predictive insights directly assist the policy module in generating actions, effectively reducing decision errors while optimizing the accuracy and rationality of motion execution.
Simulation Mode:High-Fidelity Feedback for Data Generation
Operates as an interactive simulator capable of generating high-fidelity environmental feedback based on robot motion inputs. By producing high-quality synthetic data, it provides a rich data source for model training and policy optimization, significantly accelerating the learning process.